Draw forecast sample paths from a fitted 3DX model
Usage
# S3 method for threedx
predict(
object,
horizon,
n_samples,
observation_driven,
innovation_function,
postprocess = identity,
...
)Arguments
- object
A fitted model object of class
threedx- horizon
An integer defining the forecast horizon
- n_samples
An integer defining the number of sample paths to draw
- observation_driven
Logical; if
TRUE, sample paths are generated by drawing from weighted historical observations directly instead of adding innovation noise on the current mean forecast. This is similar to the Non-Parametric Time Series forecaster (NPTS) described in "GluonTS: Probabilistic Time Series Models in Python" (2019) by Alexandrov et al. (see https://arxiv.org/abs/1906.05264). IfFALSE, sample paths will be generated by adding innovation noise on top of the current weighted average forecast.- innovation_function
A function with arguments
nanderrors. Must be able to handle additional parameters via...to allow for potential future changes in the set of arguments passed toinnovation_functionbypredict.threedx(). For examples, seedraw_normal_with_drift()ordraw_bootstrap_weighted(). The providedinnovation_functionmust return a numeric vector of lengthnthat contains i.i.d samples that can be used for any sample path and forecast horizon. This argument is ignored whenobservation_driven=TRUE.- postprocess
A function that is applied on a numeric vector of drawn samples for a single step-ahead before the samples are used to update the state of the model, and before outliers are removed (if applicable). By default equal to
identity(), but could also be something likefunction(x) pmax(x, 0)to enforce a lower bound of 0, or any other transformation of interest that returns a numeric vector of equal length as that of the input. Note that this can cause arbitrary errors caused by the author of the function provided topostprocess. For examples, seeto_non_negative_with_identical_mean()orto_moment_matched_nbinom().- ...
Additional arguments passed to
innovation_function
Value
A forecast object of class threedx_paths, which is a list of:
A
pathsnumeric matrix of dimensionsn_samples-times-horizon. The matrix stores the forecast sample paths that are the probabilistic forecast returned by thethreedxmodel. Aggregate across the first dimension to derive expectations of the forecast distribution, aggregate across the second dimension to derive sums over the forecast horizon.The input
horizonargumentThe input
n_samplesargumentThe input
observation_drivenargumentThe model
modelprovided viaobject, an object of classthreedx
Details
While observation_driven can be effective at forecasting wide
ranges of time series, the induced forecast distribution collapses to a
single point as alpha, alpha_seasonal, and alpha_seasonal_decay
values tend towards 1. While the corresponding point prediction may still
be optimal, the uncertainty in the forecast is likely underestimated.
For example, if alpha = 0.98, alpha_seasonal=0, and
alpha_seasonal_decay=0, the resulting forecast distribution assigns 98%
probability to the most recent observation, thus collapsing most prediction
intervals onto that point. This can be highly unrealistic for time series
whose level is changing rapidly and therefore require large alpha values.
To circumvent this issue, one can design certain conditions under
which observation_driven is set to TRUE. For example, using
k_largest_weights_sum_to_less_than_p_percent(), one can check that the
learned model assigns weight to at least a few observations, and only then
set observation_driven=TRUE. However, if the underlying time series is
truly a random walk, observation_driven=TRUE will always be a poor choice
as it limits the range of possible future values too much.
Examples
set.seed(9284)
y <- stats::rpois(n = 55, lambda = pmax(0.1, 1 + 10 * sinpi((5 + 1:55 )/ 6)))
model <- learn_weights(
y = y,
alphas_grid = list_sampled_alphas(
n_target = 1000L,
include_edge_cases = TRUE
),
period_length = 12L,
loss_function = loss_mae
)
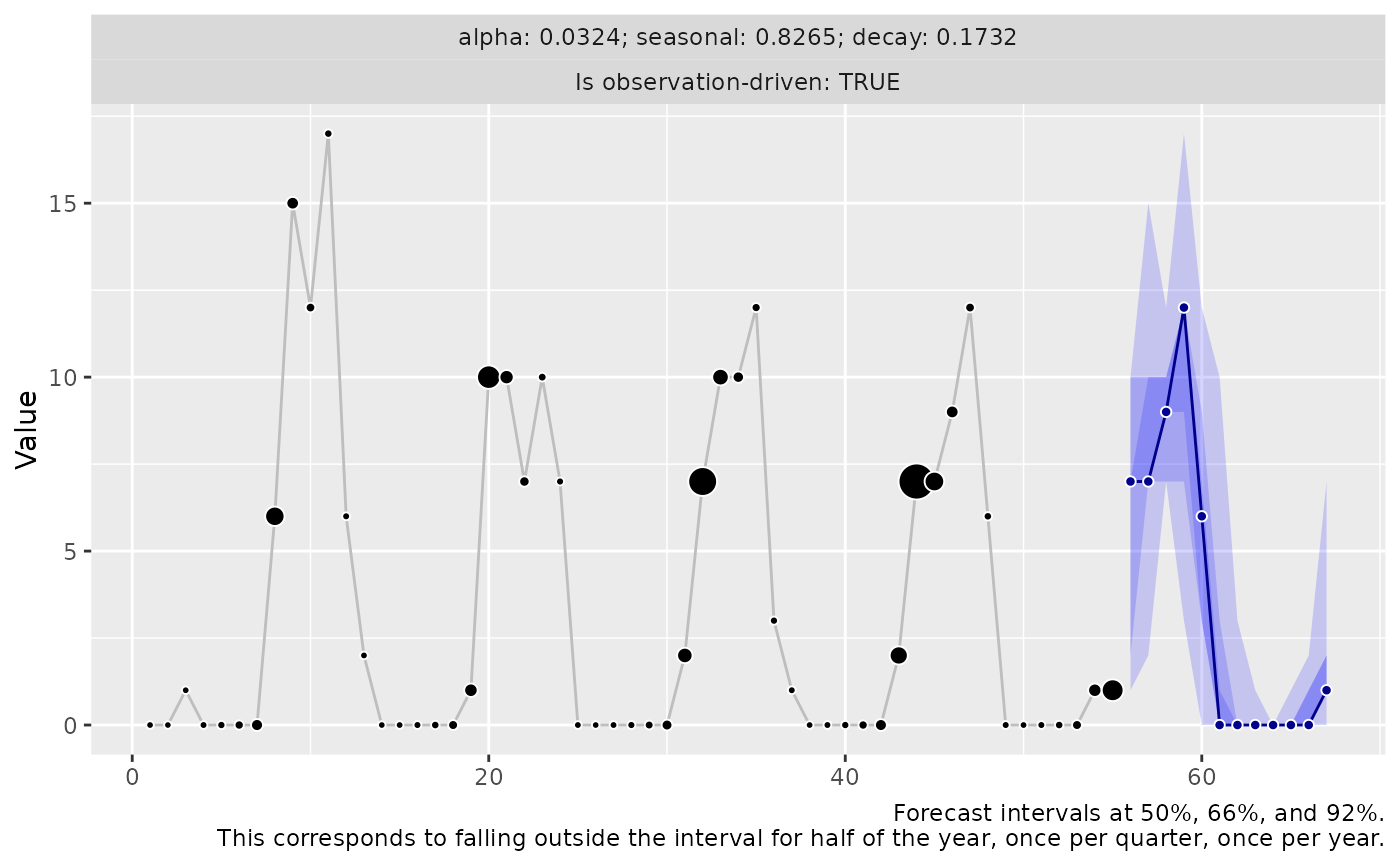
forecast_observation_driven <- predict(
object = model,
horizon = 12L,
n_samples = 2500L,
observation_driven = TRUE
)
if (require("ggplot2")) {
autoplot(forecast_observation_driven)
}
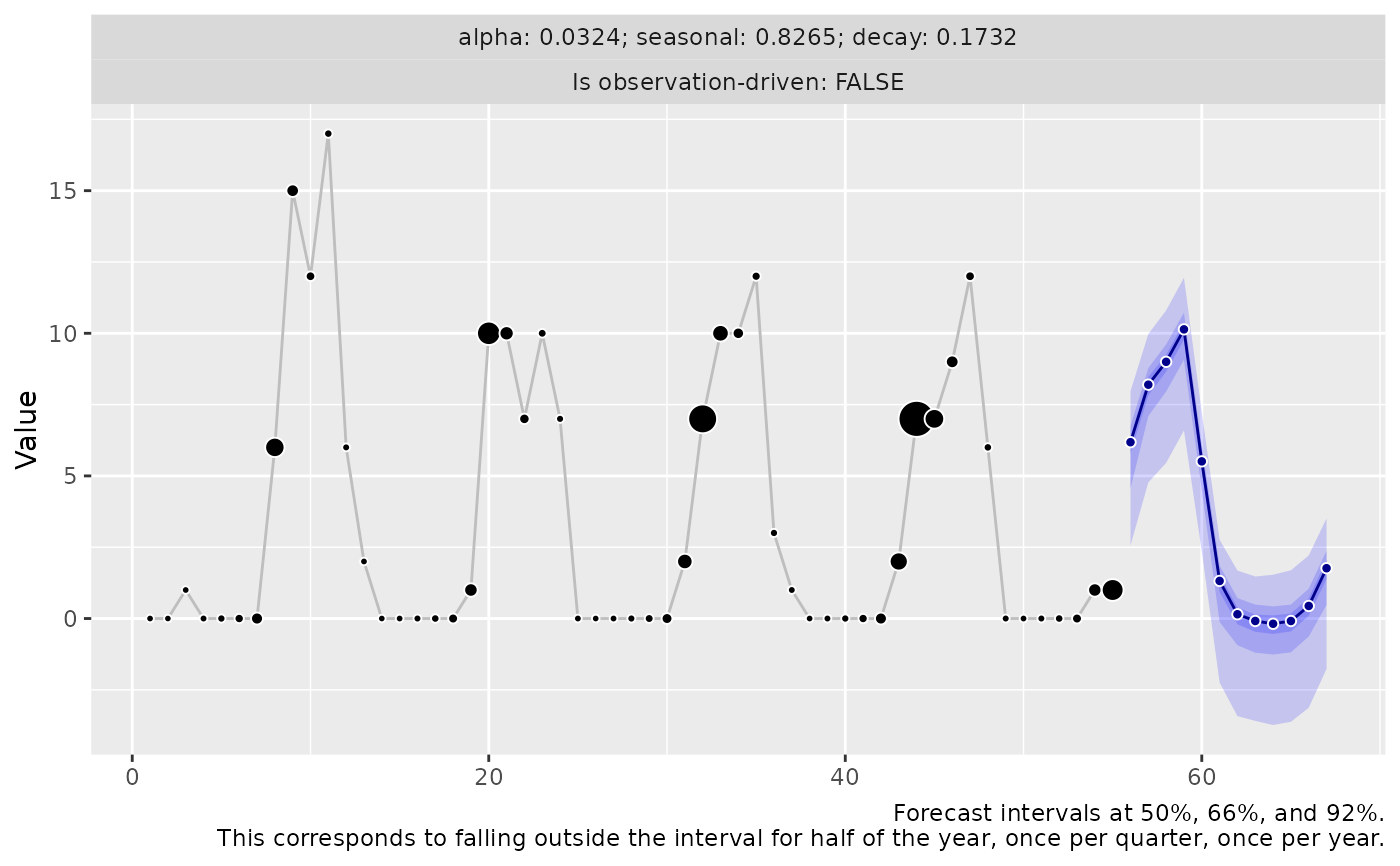
 forecast_latent <- predict(
object = model,
horizon = 12L,
n_samples = 2500L,
observation_driven = FALSE,
innovation_function = draw_bootstrap
)
if (require("ggplot2")) {
autoplot(forecast_latent)
}
forecast_latent <- predict(
object = model,
horizon = 12L,
n_samples = 2500L,
observation_driven = FALSE,
innovation_function = draw_bootstrap
)
if (require("ggplot2")) {
autoplot(forecast_latent)
}
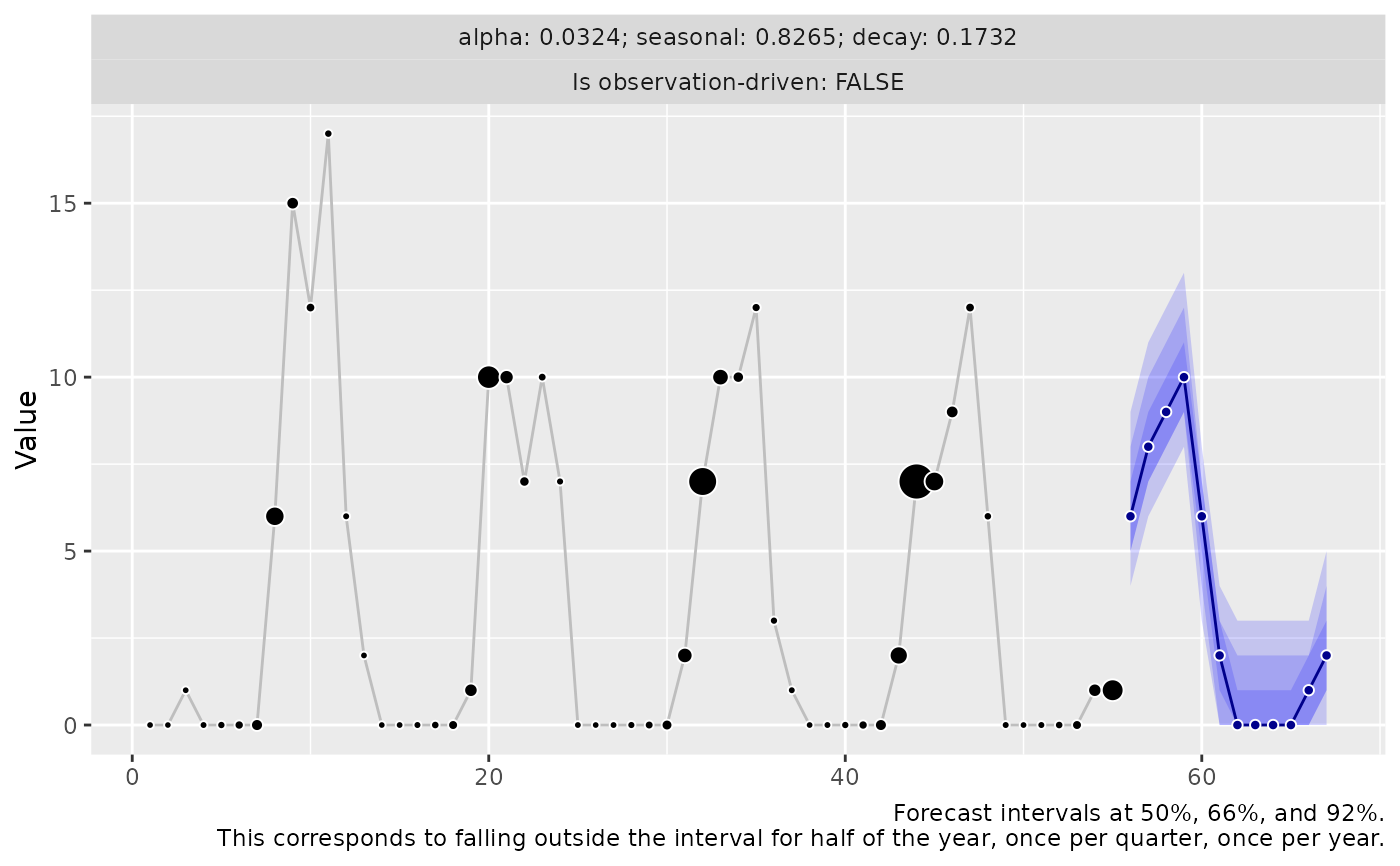
 forecast_latent_with_postprocessing <- predict(
object = model,
horizon = 12L,
n_samples = 2500L,
observation_driven = FALSE,
innovation_function = draw_normal_with_zero_mean,
postprocess = function(x) round(pmax(x, 0))
)
if (require("ggplot2")) {
autoplot(forecast_latent_with_postprocessing)
}
forecast_latent_with_postprocessing <- predict(
object = model,
horizon = 12L,
n_samples = 2500L,
observation_driven = FALSE,
innovation_function = draw_normal_with_zero_mean,
postprocess = function(x) round(pmax(x, 0))
)
if (require("ggplot2")) {
autoplot(forecast_latent_with_postprocessing)
}